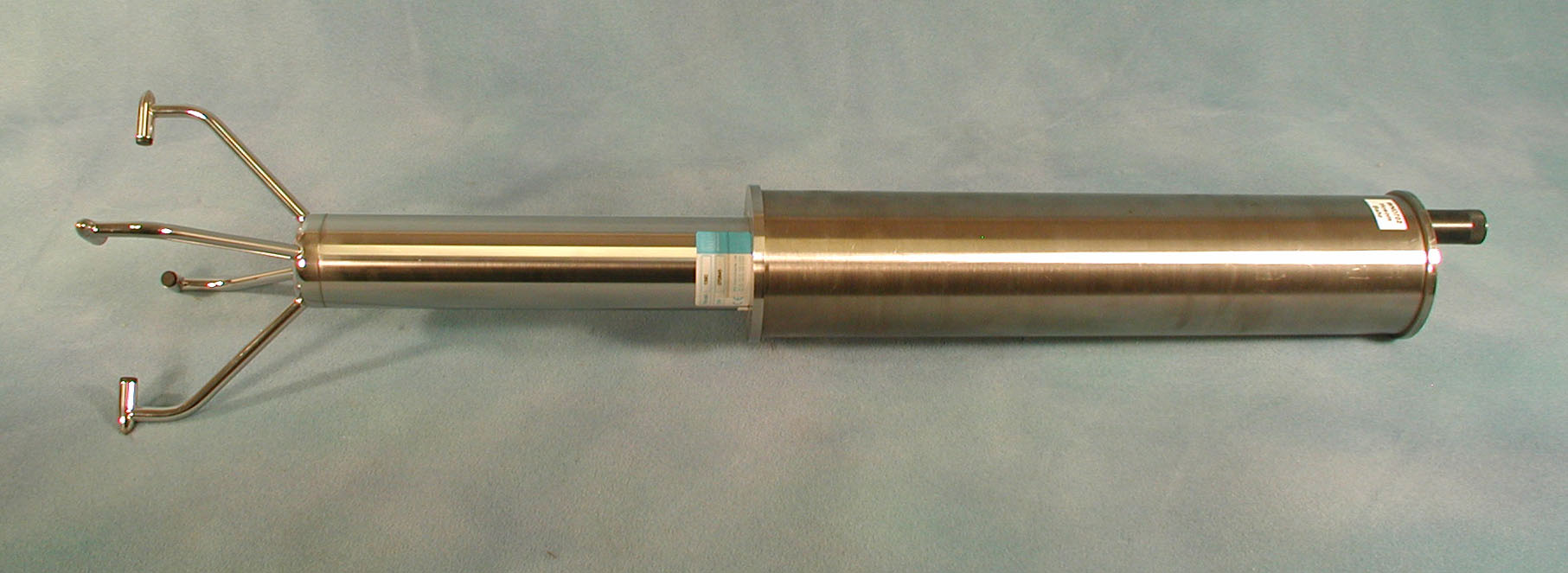
ASIMET Barometric Pressure Module (BPR)

Specifications
- Sensor: Heise DXD (Dresser Instruments)
- Range: 850 to 1050 mb, Resolution: 0.01 mb
- Accuracy: UOP lab calibration, 0.2 mb; Manufacturer, 0.02% F.S.
- Drift (post vs. pre cal after 1 yr): 1.5 mb (Colbo&Weller, 2008)
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 419mm (16.5")
- Overall length 517 mm (20.4")
- Weight in air 3.2 kg (7 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 4.5 ma average current (8 ma peak)
- Sampling:
- Response time: N/A
- Single samples at up to 0.0167 Hz (once per minute)
- Minimum on-time: 3 min
- Output variables: pressure (mb)
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes: Calibration is checked using a lab-standard electronic
barometer and the bias is adjusted as required. Calibration constants
are stored in the EEPROM.
Usage Notes: A parallel-plate pressure port is used to reduce dynamic
pressure errors (due to wind blowing over an exposed sensor port) to
< 0.5 mb at 20 m/s. An internal baffle system impedes water and
snow intrusion. The electronics housing is fouling and corrosion
resistant (titanium) and immersion tolerant (o-ring seals).
ASIMET Relative Humidity & Air Temperature Module (HRH)
Specifications
- Sensor: Rotronic MP-101A
- Range: 0 to 100 %RH, - 40 to +60 oC
- Resolution: 0.01%RH, 0.02 C
- Accuracy: UOP lab calibration, 1 %RH, 0.05 oC
- Drift (post vs. pre cal after 1 yr): 1 %RH, 0.05 oC
(Colbo&Weller, 2008)
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 267mm (10.5")
- Overall length 535mm (21")
- Weight in air 3.2 kg (7 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 3.0 ma average current (4 ma peak)
- Sampling:
- Response time: 10 s (without membrane filter)
- Single samples at up to 0.0167 Hz (once per minute)
- Minimum on-time: 3 min
- Output variables: relative humidity (%RH), temperature (oC)
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes: Relative
humidity is calibrated over a range of 25 to 95 % RH in a test
chamber with stability of 0.1% RH. Temperature is calibrated over a
range of 1 to 35 oC in a water bath with a resolution of
0.001 oC and an accuracy of 0.005 oC.
Calibration constants are stored in the EEPROM.
Usage Notes: The sensor probe is protected by a Rotronic MF25
membrane filter and placed inside a modified R.M. Young multi-plate
radiation shield for standard use. The electronics housing is fouling
and corrosion resistant (titanium) and immersion tolerant (o-ring
seals). Installation location should provide unobstructed air flow
past the sensor and minimize heat-island effects. Motorized
aspiration may be necessary in low winds.
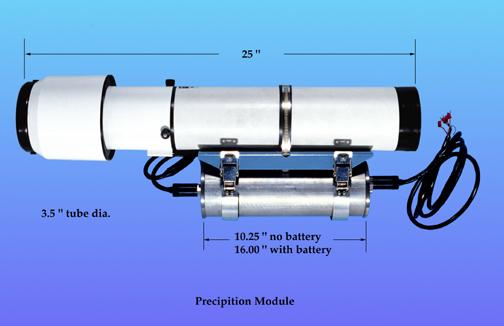
ASIMET Precipitation Module (PRC)
Specifications
- Sensor: RM Young 50202 Self-siphoning rain gauge
- Range: 0 to 50 mm, Resolution: 0.1 mm
- Accuracy, Level: Manufacturer spec, 1 mm
- Accuracy, Rate: Lab calibration, 1 mm/hr (Serra et al., 2001)
- Physical:
- Electronics housing: Diameter 89 mm (3.5"), Length 267mm (10.5")
- Sensor housing: Diameter 108 mm (4.25"), Length 650 mm (25.5")
- Overall length 650 mm (25.5")
- Weight in air 4.5 kg (10 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 3.0 ma average current (6 ma peak)
- Sampling:
- Response time: N/A
- Single samples at up to 0.0167 Hz (once per minute)
- Minimum on-time: 3 min
- Output variables: water level (mm)
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes: Calibration is done by adding successive, known volumes of
water. Calibration constants are stored in the EEPROM.
Usage Notes: The electronics housing is fouling and corrosion resistant
(titanium) and immersion tolerant (o-ring seals). The sensor housing
is susceptible to cracking if the column of water inside freezes.
Rain rate must be computed by post-processing, taking into account
the occurrence of siphoning intervals. Drainage time is approximately
20 sec. Catchment intake is susceptible to fouling by guano.
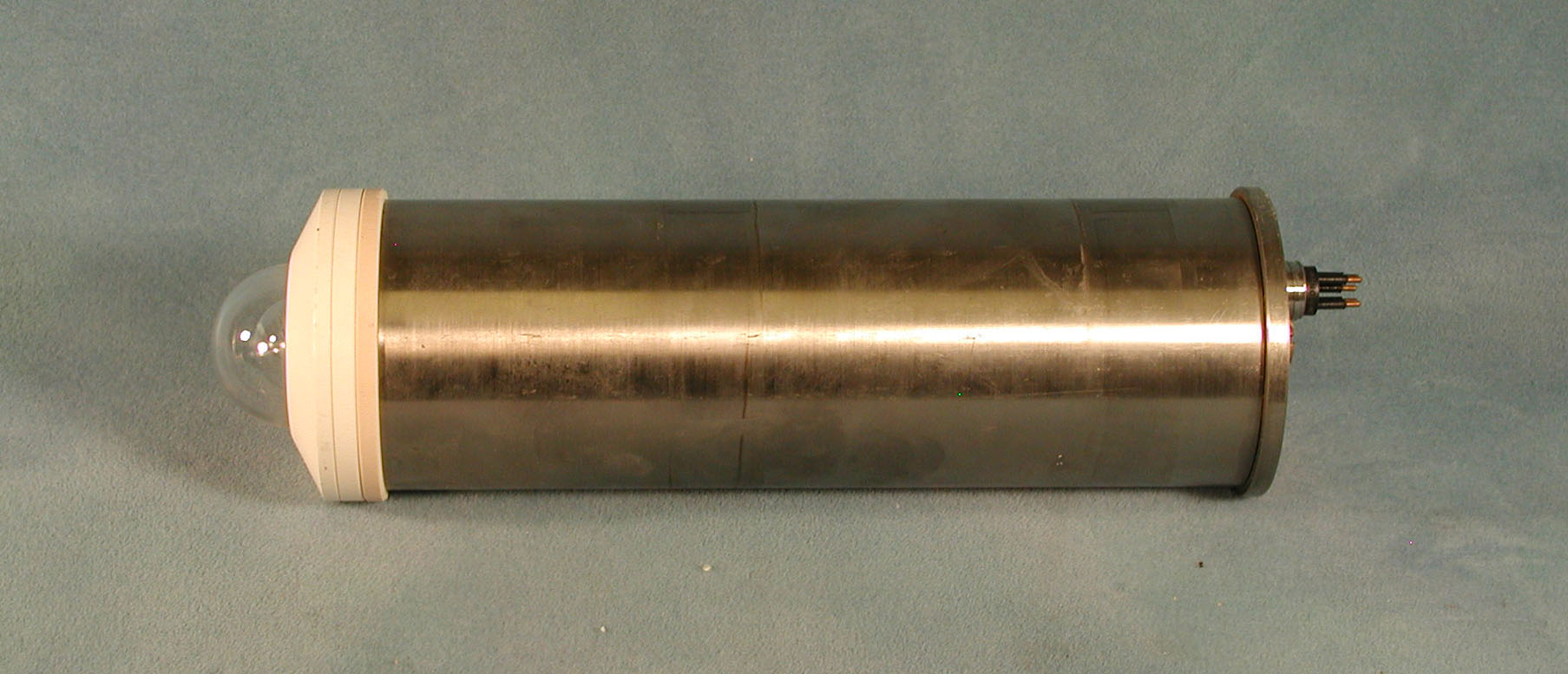
ASIMET Shortwave Radiation Module (SWR)
Specifications
- Sensor: Eppley Precision Spectral Pyranometer (PSP)
- Range: 0 to 2800 W/m^2, Resolution: 0.1 W/m^2
- Accuracy: Comparison to standard, 2 W/m^2 (Colbo & Weller, 2008)
- Drift (post vs. pre calibration after 1 yr): 2 W/m^2 (Colbo & Weller, 2008)
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 267mm (10.5")
- Overall length 310 mm (12.25")
- Weight in air 2.3 kg (5 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 5.5 ma average current (7 ma peak)
- Sampling:
- Response time: 1 sec
- Single samples at up to 0.1 Hz averaged to 0.0167 Hz (one minute)
- Minimum on-time: 3 min
- Output variables: shortwave radiation (W/m^2)
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes: The gain adjustment and calibration of the sensor
electronics are made separately. The complete assembly is calibrated
outside in sunlight against a traceable standard. Combined
calibration constants are stored in the unit EEPROM.
Usage Notes: The sensor is mounted on an aluminum base which provides a
reference mass, and the base is mounted to a PVC endcap for thermal
isolation from the housing. The sensor uses a temperature-compensated
thermopile. Temperature Dependence is +/- 1% from -20 to +40 C.
Linearity is +/- 0.5% from 0 to 1400 W/m^2. The electronics housing
is fouling and corrosion resistant (titanium) and immersion tolerant
(o-ring seals). Domes made of clear glass which is transparent to
energy between 0.285 to 2.8µm. Domes are susceptible to fouling
by salt particles, dust, and guano. The sensor must be mounted to
avoid shadowing of the dome for all sun angles.
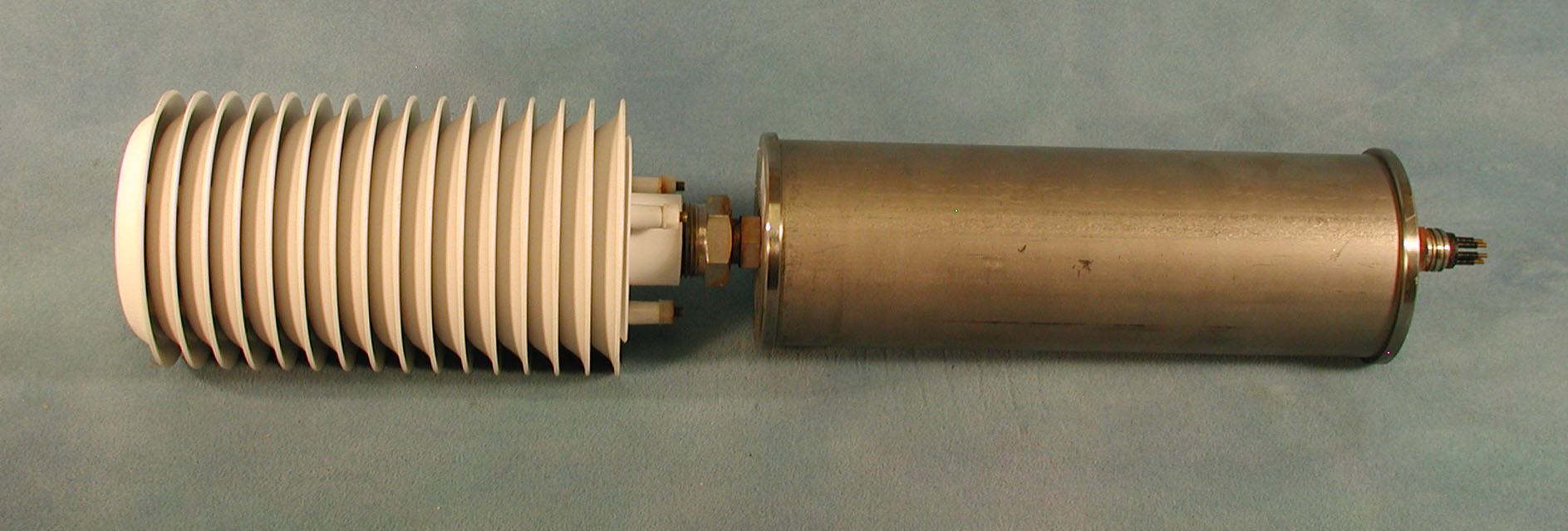
ASIMET Longwave Radiation Module (LWR)

Specifications
- Sensor: Eppley Precision Infrared Radiometer (PIR)
- Range: 0 to 700 W/m^2, Resolution: 0.1 W/m^2
- Accuracy: Comparison to standard, 2 W/m^2 (Colbo & Weller, 2008)
- Drift (post vs. pre calibration after 1 yr): 2 W/m^2 (Colbo & Weller, 2008)
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 267mm (10.5")
- Overall length 310 mm (12.25")
- Weight in air 2.3 kg (5 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 3.5 ma average current (7 ma peak)
- Sampling:
- Response time: 2 s
- Single samples at up to 0.0167 Hz (once per minute)
- Minimum on-time: 3 min
- Output variables: dome temperature (K), body temperature (K),
thermopile voltage (V) and longwave radiation flux (W/m^2)
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes: The laboratory electronics calibration procedure used at
WHOI has been outlined by Payne and Anderson (1999). The complete
module is then verified outdoors by comparison to a traceable
standard. Calibration constants are stored in the unit EEPROM.
Usage Notes: The
electronics housing is fouling and corrosion resistant (titanium) and
immersion tolerant (o-ring seals). The sensor must be mounted to
avoid shadowing of the dome for all sun angles. Isolation of
long-wave radiation in daytime is accomplished by using a silicone
domeand filter with a transmission range of approximately 3.5 to 50
µm. Domes are susceptible to fouling by salt particles, dust,
and guano.
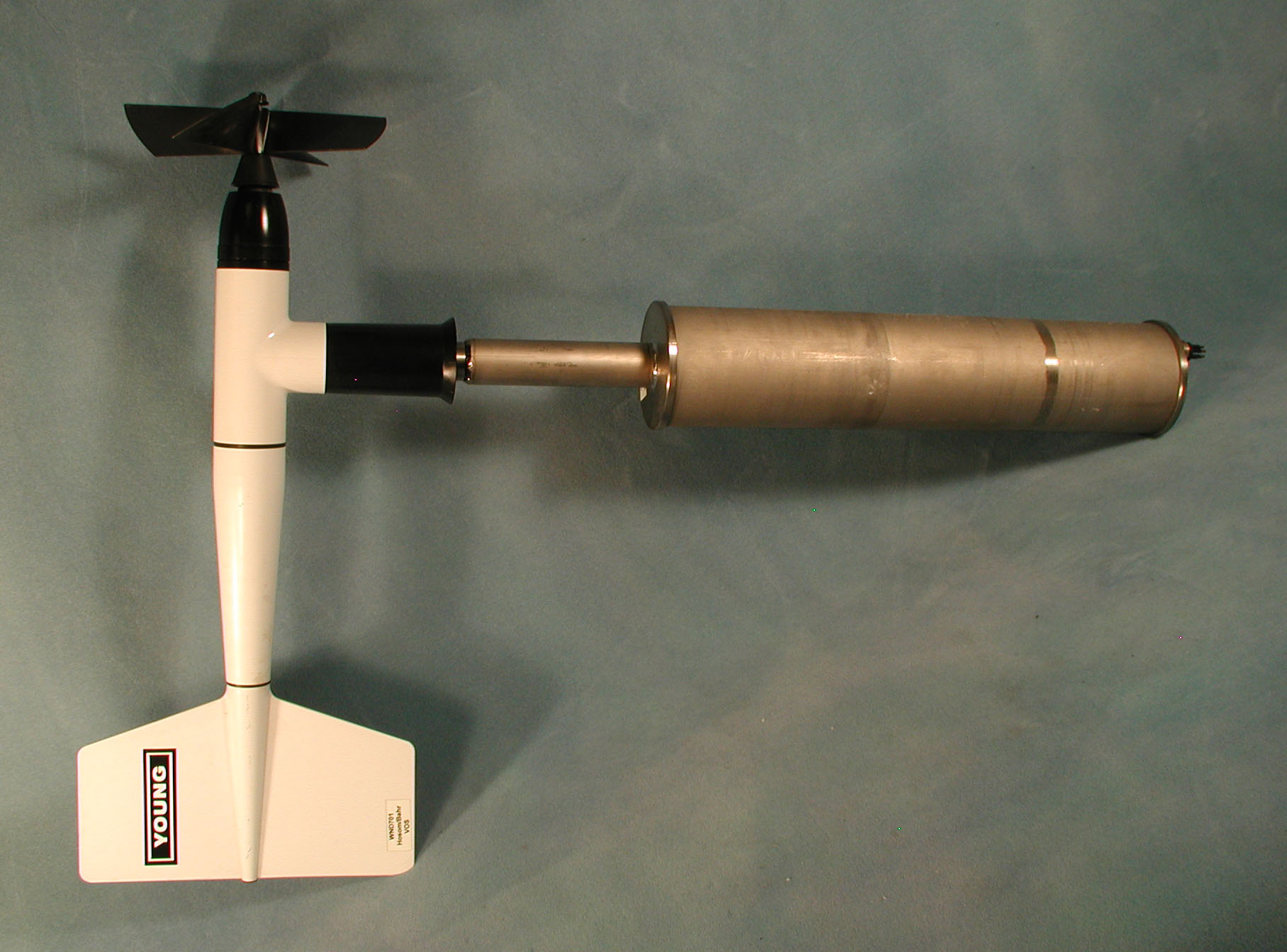
ASIMET Propeller and Vane Wind Module (WND)
Specifications:
- Sensor: R.M. Young 5103 wind monitor.
- Range: 0 to 60 m/s*, 0 to 360 deg (*threshold ~1 m/s)
- Resolution: 0.01 m/s, 0.1 deg
- Accuracy: UOP lab calibration, 1%, 3 degrees
- Drift (post vs. pre cal after 1 yr): 0.1 m/s, 2.0 deg (Colbo&Weller 2008)
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 380 mm (15")
- Overall length 760 mm (30")
- Weight in air 4.5 kg (10 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 11.5 ma average current (25 ma peak)
- Sampling:
- Response time:
- Propeller distance constant (63% recovery) 2.7 m
- Vane delay distance (50% recovery) 1.3 m
- Vector averaged samples at up to 0.0167 Hz (see sampling notes)
- Minimum on-time: 3 min
- Output variables: east wind (m/s), north wind m/s, scalar-average
wind m/s, maximum 5 sec wind speed (m/s), minimum 5 second wind
speed (m/s), last vane direction (degrees), last compass direction
(degrees), x-axis tilt* (degrees), y-axis tilt* (degrees)
- * tilt variables are available via direct output from the WND
module, but are not carried through to the present generation of
ASIMET loggers.
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes:
The speed is checked at several standard values using an R.M.Young
calibration unit. Operation of the vane encoder and compass are
checked by rotating the module and vane slowly through 360 degrees
with confirmation of indicated directions for at least two known
directions in each quadrant. Vane alignment is checked and adjusted
as required.
Sampling Notes:
Scalar wind speed and direction are measured at 5 s intervals.
Propeller pulses (3 pulses per revolution) are counted for 5 s while
vane direction is sampled each second, and the compass is sampled in
the middle of the 5 s interval. At the end of each interval, wind
speed is calculated, vane direction is averaged and added to the
compass direction to give wind direction, and the wind vector
velocity is computed. At the end of 1 min the following variables are
stored: the vector sum of 5 s velocities, the scalar averaged wind
speed, the maximum of the (5 second) wind speeds, the last vane
direction, and the last compass direction.
Usage Notes: The
RM Young 5103 standard vane potentiometer is removed and the vane
shaft extended down and coupled with an absolute angle encoder. A
magnetometer compass is used to provide the north reference.
Propeller bearings are replaced after 1 yr of field operations. The
electronics housing is fouling and corrosion resistant (titanium) and
immersion tolerant (o-ring seals). The sensor must be mounted to
avoid flow disturbance created by the mounting platform.
ASIMET Sonic Wind Module (SWND)
Specifications:
- Sensor: Gill Instruments WindObserver II Ultrasonic Anemometer
- Range: 0 to 65 m/s, 0 to 360 deg 0.01 m/s
- Resolution: 0.01 m/s, 0.1 deg
- Accuracy: Manufacturer spec, 2%, 2 degrees
- Drift (post vs. pre cal after 1 yr): N/A
- Physical:
- Housing: Diameter 89 mm (3.5"), Length 380 mm (15")
- Overall length 760 mm (30")
- Weight in air 4.5 kg (10 pounds)
- Electrical:
- +12 vdc to +15 vdc
- 50 ma average current
- Sampling:
- Response time: N/A
- Vector averaged samples at up to 0.0167 Hz (see sampling notes)
- Minimum on-time: 3 min
- Output variables: east wind (m/s), north wind m/s, scalar-average
wind m/s, maximum 5 sec wind speed (m/s), minimum 5 second wind
speed (m/s), last XY direction (degrees)(computed from Gill U & V), last compass direction
(degrees) ), x-axis tilt* (degrees), y-axis tilt* (degrees)
- * tilt variables are available via direct output from the WND
module, but are not carried through to the present generation of
ASIMET loggers.
- Communications:
- RS485 or RS232 (9600, N, 8, 1) IMET format
Calibration Notes:
TBD
Sampling Notes: Each measurement takes 25msec, so the base sample
rate is 40Hz. There is overhead involved to output the data at the
end of a sampling burst, resulting in 195 samples in a 5 s interval
(39 Hz). Within each 5 s interval the compass is polled once, near
the center of the interval. One minute averages are computed from 11
5-s intervals with 5 s of overhead for vector averaging. Proposed
duty cycle reduction would be to produce 1 min averages from 8 s on
and 7s off within 4 consecutive 15 sec intervals rather than
“continuously” within 11 consecutive 5 sec intervals.
Usage Notes:
Sonic probe elements are mechanically fragile during handling, but
robust during deployment. The electronics housing is fouling and
corrosion resistant (titanium) and immersion tolerant (o-ring seals).
The sensor must be mounted to avoid flow disturbance created by the
mounting platform.